
โครงสร้างและการออกแบบของรถยนต์ไฟฟ้าบริสุทธิ์นั้นแตกต่างจากรถยนต์ที่ขับเคลื่อนด้วยเครื่องยนต์สันดาปภายในแบบเดิมๆ นอกจากนี้ยังเป็นวิศวกรรมระบบที่ซับซ้อนอีกด้วย จำเป็นต้องบูรณาการเทคโนโลยีพลังงานแบตเตอรี่ เทคโนโลยีขับเคลื่อนมอเตอร์ เทคโนโลยียานยนต์ และทฤษฎีการควบคุมที่ทันสมัย เพื่อให้บรรลุกระบวนการควบคุมที่เหมาะสมที่สุด ในแผนพัฒนาวิทยาศาสตร์และเทคโนโลยียานยนต์ไฟฟ้า จีนยังคงยึดมั่นรูปแบบการวิจัยและพัฒนา "สามแนวตั้งและสามแนวนอน" และยังเน้นย้ำถึงการวิจัยเกี่ยวกับเทคโนโลยีหลักทั่วไปของ "สามแนวนอน" ตามกลยุทธ์การเปลี่ยนแปลงเทคโนโลยีของ "ไดรฟ์ไฟฟ้าบริสุทธิ์" ได้แก่ การวิจัยเกี่ยวกับมอเตอร์ขับเคลื่อนและระบบควบคุม แบตเตอรี่พลังงานและระบบการจัดการ และระบบควบคุมระบบส่งกำลัง ผู้ผลิตรายใหญ่แต่ละรายกำหนดกลยุทธ์การพัฒนาธุรกิจของตนเองตามยุทธศาสตร์การพัฒนาประเทศ
ผู้เขียนได้แยกแยะเทคโนโลยีที่สำคัญในกระบวนการพัฒนาระบบส่งกำลังพลังงานใหม่ โดยให้พื้นฐานทางทฤษฎีและการอ้างอิงสำหรับการออกแบบ การทดสอบ และการผลิตระบบส่งกำลัง แผนดังกล่าวแบ่งออกเป็นสามบทเพื่อวิเคราะห์เทคโนโลยีที่สำคัญของการขับเคลื่อนด้วยไฟฟ้าในระบบส่งกำลังของยานพาหนะไฟฟ้าบริสุทธิ์ วันนี้เราจะมาแนะนำหลักการและการจำแนกประเภทของเทคโนโลยีขับเคลื่อนด้วยไฟฟ้ากันก่อน
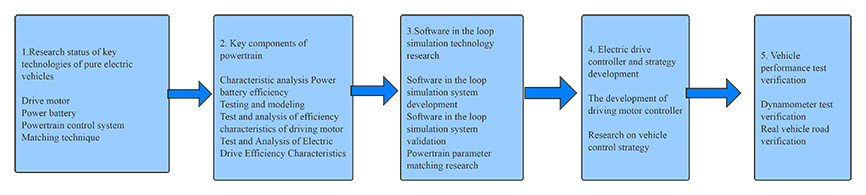
รูปที่ 1 ลิงค์สำคัญในการพัฒนาระบบส่งกำลัง
ปัจจุบัน เทคโนโลยีหลักที่สำคัญของระบบส่งกำลังของรถยนต์ไฟฟ้าบริสุทธิ์ประกอบด้วยสี่ประเภทดังต่อไปนี้:
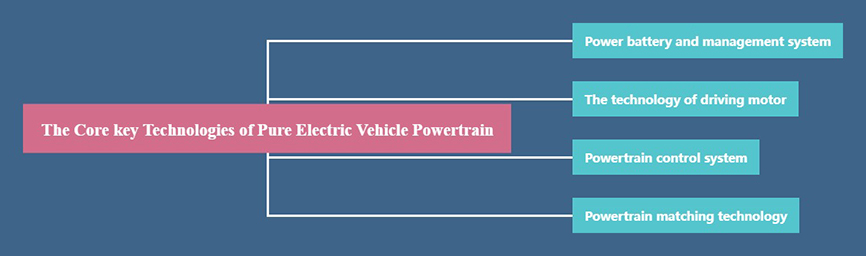
รูปที่ 2 เทคโนโลยีหลักที่สำคัญของระบบส่งกำลัง
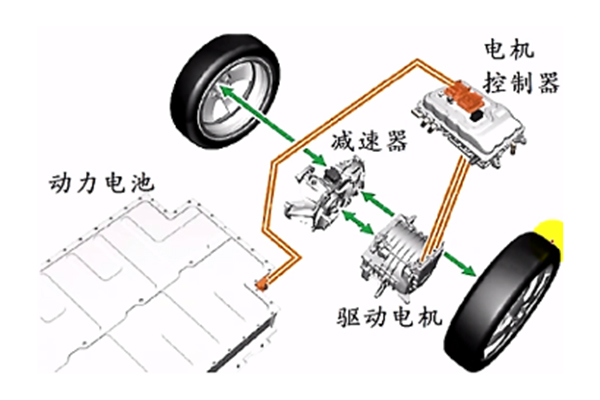
คำจำกัดความของระบบขับเคลื่อนมอเตอร์
ตามสถานะของแบตเตอรี่พลังงานรถยนต์และข้อกำหนดของพลังงานรถยนต์ มันจะแปลงพลังงานไฟฟ้าที่ส่งออกโดยอุปกรณ์สร้างพลังงานเก็บพลังงานออนบอร์ดเป็นพลังงานกล และพลังงานจะถูกส่งไปยังล้อขับเคลื่อนผ่านอุปกรณ์ส่งสัญญาณและชิ้นส่วน ของพลังงานกลของยานพาหนะจะถูกแปลงเป็นพลังงานไฟฟ้าและป้อนกลับเข้าไปในอุปกรณ์เก็บพลังงานเมื่อรถเบรก ระบบขับเคลื่อนด้วยไฟฟ้าประกอบด้วยมอเตอร์ กลไกการส่งกำลัง ตัวควบคุมมอเตอร์ และส่วนประกอบอื่นๆ การออกแบบพารามิเตอร์ทางเทคนิคของระบบขับเคลื่อนพลังงานไฟฟ้าส่วนใหญ่ประกอบด้วยกำลัง แรงบิด ความเร็ว แรงดันไฟฟ้า อัตราส่วนการส่งผ่านของการลด ความจุของแหล่งจ่ายไฟ กำลังไฟฟ้าขาออก แรงดันไฟฟ้า กระแส ฯลฯ

1) ตัวควบคุมมอเตอร์
เรียกอีกอย่างว่าอินเวอร์เตอร์ โดยจะเปลี่ยนอินพุตกระแสตรงโดยชุดแบตเตอรี่พลังงานให้เป็นไฟฟ้ากระแสสลับ ส่วนประกอบหลัก:
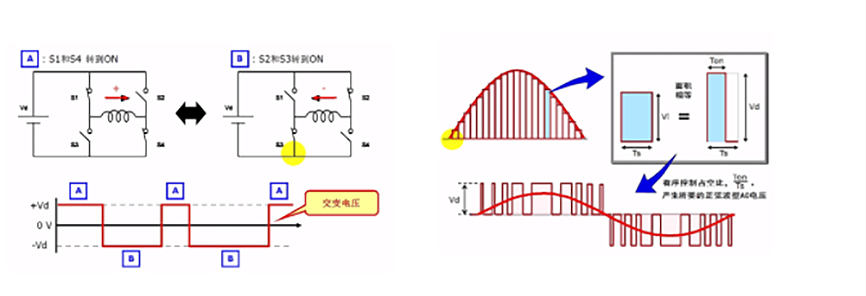
○ IGBT: สวิตช์อิเล็กทรอนิกส์กำลัง หลักการ: ผ่านตัวควบคุม ควบคุมแขนสะพาน IGBT เพื่อปิดความถี่และสวิตช์ลำดับเพื่อสร้างกระแสสลับสามเฟส โดยการควบคุมสวิตช์อิเล็กทรอนิกส์กำลังให้ปิด จึงสามารถแปลงแรงดันไฟฟ้ากระแสสลับได้ จากนั้นแรงดันไฟฟ้ากระแสสลับจะถูกสร้างขึ้นโดยการควบคุมรอบการทำงาน
ความจุของฟิล์ม: ฟังก์ชั่นการกรอง; เซ็นเซอร์กระแส: ตรวจจับกระแสของขดลวดสามเฟส
2) วงจรควบคุมและขับเคลื่อน: แผงควบคุมคอมพิวเตอร์, ขับ IGBT
บทบาทของตัวควบคุมมอเตอร์คือการแปลง DC เป็น AC รับสัญญาณแต่ละตัว และส่งออกกำลังและแรงบิดที่สอดคล้องกัน ส่วนประกอบหลัก: สวิตช์อิเล็กทรอนิกส์กำลัง ตัวเก็บประจุแบบฟิล์ม เซ็นเซอร์กระแส ควบคุมวงจรขับเคลื่อนเพื่อเปิดสวิตช์ต่างๆ สร้างกระแสในทิศทางที่ต่างกัน และสร้างแรงดันไฟฟ้ากระแสสลับ ดังนั้นเราจึงสามารถแบ่งกระแสสลับไซน์ซอยด์ออกเป็นสี่เหลี่ยมได้ พื้นที่ของสี่เหลี่ยมจะถูกแปลงเป็นแรงดันไฟฟ้าที่มีความสูงเท่ากัน แกน x รับรู้ถึงการควบคุมความยาวโดยการควบคุมรอบการทำงาน และสุดท้ายก็รับรู้ถึงการแปลงพื้นที่ที่เทียบเท่ากัน ด้วยวิธีนี้ สามารถควบคุมกำลังไฟ DC เพื่อปิดแขนบริดจ์ IGBT ที่ความถี่ที่แน่นอน และสลับลำดับผ่านตัวควบคุมเพื่อสร้างไฟ AC สามเฟส
ในปัจจุบัน ส่วนประกอบสำคัญของวงจรขับเคลื่อนขึ้นอยู่กับการนำเข้า: ตัวเก็บประจุ, หลอดสวิตช์ IGBT/MOSFET, DSP, ชิปอิเล็กทรอนิกส์ และวงจรรวม ซึ่งสามารถผลิตได้อย่างอิสระ แต่มีความจุต่ำ: วงจรพิเศษ เซ็นเซอร์ ตัวเชื่อมต่อ ซึ่งสามารถ ผลิตโดยอิสระ: แหล่งจ่ายไฟ, ไดโอด, ตัวเหนี่ยวนำ, แผงวงจรหลายชั้น, สายไฟหุ้มฉนวน, หม้อน้ำ
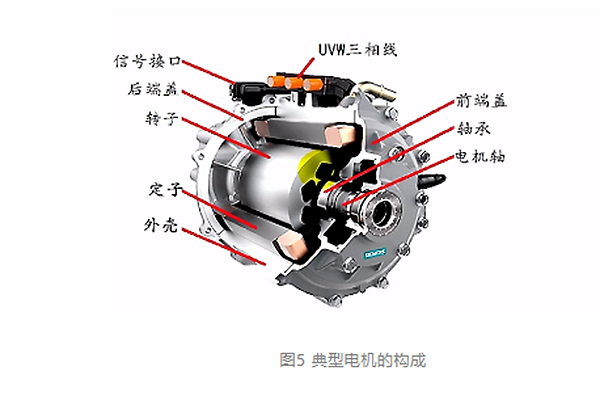
3) มอเตอร์: แปลงไฟฟ้ากระแสสลับสามเฟสเป็นเครื่องจักร
○ โครงสร้าง: ฝาครอบปลายด้านหน้าและด้านหลัง เปลือก เพลา และแบริ่ง
◎ วงจรแม่เหล็ก: แกนสเตเตอร์, แกนโรเตอร์
○ วงจร: ขดลวดสเตเตอร์, ตัวนำโรเตอร์
4) อุปกรณ์ส่งสัญญาณ
กระปุกเกียร์หรือตัวลดความเร็วจะแปลงความเร็วแรงบิดที่มอเตอร์ส่งออกไปเป็นความเร็วและแรงบิดที่ยานพาหนะทั้งคันต้องการ
ประเภทของมอเตอร์ขับเคลื่อน
มอเตอร์ขับเคลื่อนแบ่งออกเป็นสี่ประเภทดังต่อไปนี้ ในปัจจุบัน มอเตอร์เหนี่ยวนำกระแสสลับและมอเตอร์ซิงโครนัสแม่เหล็กถาวรเป็นยานพาหนะไฟฟ้าพลังงานใหม่ประเภทที่พบบ่อยที่สุด ดังนั้นเราจึงมุ่งเน้นไปที่เทคโนโลยีของมอเตอร์เหนี่ยวนำกระแสสลับและมอเตอร์ซิงโครนัสแม่เหล็กถาวร
| มอเตอร์กระแสตรง | มอเตอร์เหนี่ยวนำไฟฟ้ากระแสสลับ | มอเตอร์ซิงโครนัสแม่เหล็กถาวร | มอเตอร์ฝืนแบบสวิตช์ | |
| ข้อได้เปรียบ | ต้นทุนต่ำกว่า ความต้องการระบบควบคุมต่ำ | ต้นทุนต่ำ ครอบคลุมพลังงานกว้าง เทคโนโลยีการควบคุมที่พัฒนาแล้ว ความน่าเชื่อถือสูง | ความหนาแน่นของพลังงานสูง ประสิทธิภาพสูง ขนาดเล็ก | โครงสร้างที่เรียบง่าย ความต้องการระบบควบคุมต่ำ |
| ข้อเสีย | ต้องการการบำรุงรักษาสูง ความเร็วต่ำ แรงบิดต่ำ อายุการใช้งานสั้น | พื้นที่ขนาดเล็กที่มีประสิทธิภาพความหนาแน่นของพลังงานต่ำ | ต้นทุนสูง การปรับตัวด้านสิ่งแวดล้อมไม่ดี | ความผันผวนของแรงบิดขนาดใหญ่เสียงการทำงานสูง |
| แอปพลิเคชัน | รถยนต์ไฟฟ้าความเร็วต่ำขนาดเล็กหรือขนาดเล็ก | ธุรกิจยานยนต์ไฟฟ้าและรถยนต์นั่งส่วนบุคคล | ธุรกิจยานยนต์ไฟฟ้าและรถยนต์นั่งส่วนบุคคล | ยานพาหนะพลังผสม |
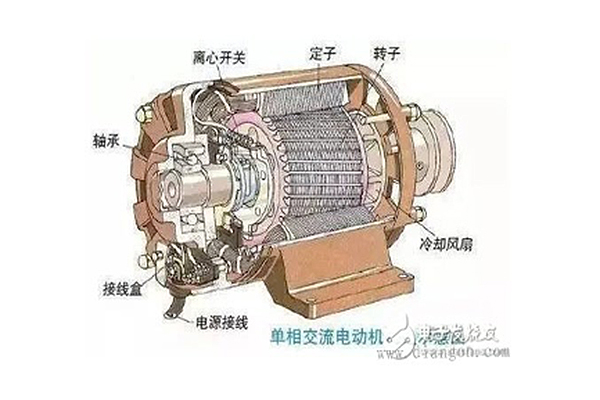 1) มอเตอร์อะซิงโครนัสเหนี่ยวนำ AC
1) มอเตอร์อะซิงโครนัสเหนี่ยวนำ AC
หลักการทำงานของมอเตอร์อะซิงโครนัสแบบอะซิงโครนัสแบบ AC คือขดลวดจะผ่านช่องสเตเตอร์และโรเตอร์: มันถูกวางซ้อนกันด้วยแผ่นเหล็กบางที่มีค่าการนำไฟฟ้าสูง ไฟฟ้าสามเฟสจะผ่านขดลวด ตามกฎการเหนี่ยวนำแม่เหล็กไฟฟ้าของฟาราเดย์ สนามแม่เหล็กที่กำลังหมุนจะถูกสร้างขึ้น ซึ่งเป็นสาเหตุที่ทำให้โรเตอร์หมุน ขดลวดสเตเตอร์ทั้งสามขดลวดเชื่อมต่อกันที่ช่วง 120 องศา และตัวนำที่มีกระแสไฟฟ้าจะสร้างสนามแม่เหล็กรอบตัวพวกมัน เมื่อใช้แหล่งจ่ายไฟสามเฟสกับการจัดเรียงพิเศษนี้ สนามแม่เหล็กจะเปลี่ยนในทิศทางที่แตกต่างกันตามการเปลี่ยนแปลงของกระแสสลับในเวลาที่กำหนด ทำให้เกิดสนามแม่เหล็กที่มีความเข้มการหมุนสม่ำเสมอ ความเร็วในการหมุนของสนามแม่เหล็กเรียกว่าความเร็วซิงโครนัส สมมติว่ามีตัวนำไฟฟ้าปิดอยู่ข้างใน ตามกฎของฟาราเดย์ เนื่องจากสนามแม่เหล็กมีความแปรผัน วงรอบจะรับรู้ถึงแรงเคลื่อนไฟฟ้า ซึ่งจะสร้างกระแสในวง สถานการณ์นี้เหมือนกับห่วงกระแสในสนามแม่เหล็ก ที่สร้างแรงแม่เหล็กไฟฟ้าบนวง และฮวนเจียงก็เริ่มหมุน การใช้สิ่งที่คล้ายกับกรงกระรอก กระแสสลับสามเฟสจะสร้างสนามแม่เหล็กหมุนผ่านสเตเตอร์ และกระแสไฟฟ้าจะถูกเหนี่ยวนำในแถบกรงกระรอกที่ลัดวงจรด้วยวงแหวนปลาย ดังนั้นโรเตอร์จึงเริ่มหมุน ซึ่งก็คือ เหตุใดมอเตอร์จึงเรียกว่ามอเตอร์เหนี่ยวนำ ด้วยความช่วยเหลือของการเหนี่ยวนำแม่เหล็กไฟฟ้าแทนที่จะเชื่อมต่อโดยตรงกับโรเตอร์เพื่อเหนี่ยวนำไฟฟ้า สะเก็ดแกนเหล็กที่เป็นฉนวนจะถูกเติมเข้าไปในโรเตอร์ เพื่อให้เหล็กขนาดเล็กรับประกันการสูญเสียกระแสไหลวนขั้นต่ำ
2) มอเตอร์ซิงโครนัส AC
โรเตอร์ของมอเตอร์ซิงโครนัสแตกต่างจากมอเตอร์อะซิงโครนัส มีการติดตั้งแม่เหล็กถาวรบนโรเตอร์ ซึ่งสามารถแบ่งออกเป็นแบบติดตั้งบนพื้นผิวและแบบฝัง โรเตอร์ทำจากแผ่นเหล็กซิลิกอน และฝังแม่เหล็กถาวรไว้ สเตเตอร์ยังเชื่อมต่อกับกระแสสลับที่มีความต่างเฟส 120 ซึ่งควบคุมขนาดและเฟสของกระแสสลับคลื่นไซน์ เพื่อให้สนามแม่เหล็กที่สร้างโดยสเตเตอร์อยู่ตรงข้ามกับที่สร้างโดยโรเตอร์และสนามแม่เหล็ก สนามกำลังหมุน ด้วยวิธีนี้ สเตเตอร์จะถูกดึงดูดโดยแม่เหล็กและหมุนด้วยโรเตอร์ วงจรแล้วรอบเล่าเกิดจากการดูดซับของสเตเตอร์และโรเตอร์
สรุป: มอเตอร์ขับเคลื่อนสำหรับยานยนต์ไฟฟ้าโดยพื้นฐานแล้วกลายเป็นกระแสหลัก แต่ก็ไม่ได้เป็นเพียงตัวเดียว แต่มีความหลากหลาย ระบบขับเคลื่อนมอเตอร์แต่ละระบบมีดัชนีที่ครอบคลุมของตัวเอง แต่ละระบบถูกนำไปใช้กับระบบขับเคลื่อนของรถยนต์ไฟฟ้าที่มีอยู่ ส่วนใหญ่เป็นมอเตอร์อะซิงโครนัสและมอเตอร์ซิงโครนัสแม่เหล็กถาวร ในขณะที่บางตัวพยายามเปลี่ยนมอเตอร์ฝืน เป็นที่น่าสังเกตว่ามอเตอร์ไดรฟ์ผสมผสานเทคโนโลยีอิเล็กทรอนิกส์กำลัง เทคโนโลยีไมโครอิเล็กทรอนิกส์ เทคโนโลยีดิจิทัล เทคโนโลยีการควบคุมอัตโนมัติ วัสดุศาสตร์ และสาขาวิชาอื่นๆ เพื่อสะท้อนถึงการใช้งานที่ครอบคลุมและโอกาสในการพัฒนาของสาขาวิชาต่างๆ ถือเป็นคู่แข่งที่แข็งแกร่งในยานยนต์ไฟฟ้า เพื่อที่จะครอบครองพื้นที่ในยานยนต์ไฟฟ้าแห่งอนาคต มอเตอร์ทุกชนิดไม่เพียงแต่จำเป็นต้องปรับโครงสร้างมอเตอร์ให้เหมาะสมเท่านั้น แต่ยังต้องสำรวจแง่มุมอัจฉริยะและดิจิทัลของระบบควบคุมอยู่ตลอดเวลาอีกด้วย
เวลาโพสต์: 30 ม.ค. 2023


